
Selected Talks

Robot Ventures in Neural Fieldse, ICRA, May, 2024
Why YOU should build (or join) an Embodied AI startup. Invited talk at the ICRA 2024 RoboNeRF workshop

Principle-centric AI, TWIMLAI Podcast, June, 2022
Introducing a new framework for embodied intelligence I call Principle-centric AI: leveraging (and learning) inductive priors to guide learning towards better outcomes (safety, efficiency, robustness).
Principle-centric AI for Embodied Intelligence, ICRA, May, 2022
Why principles might help taking ML to the next level for embodied platforms and how we have successfully used them so far. Invited talk at the ICRA 2022 workshop on “Fresh Perspectives for Autonomous Driving”

Advancing ML Research in Autonomous Vehicles, Gradient Dissent Podcast, Dec, 2021
A fun interview where I share my approach to building teams and taking state-of-the-art research from conception to production.
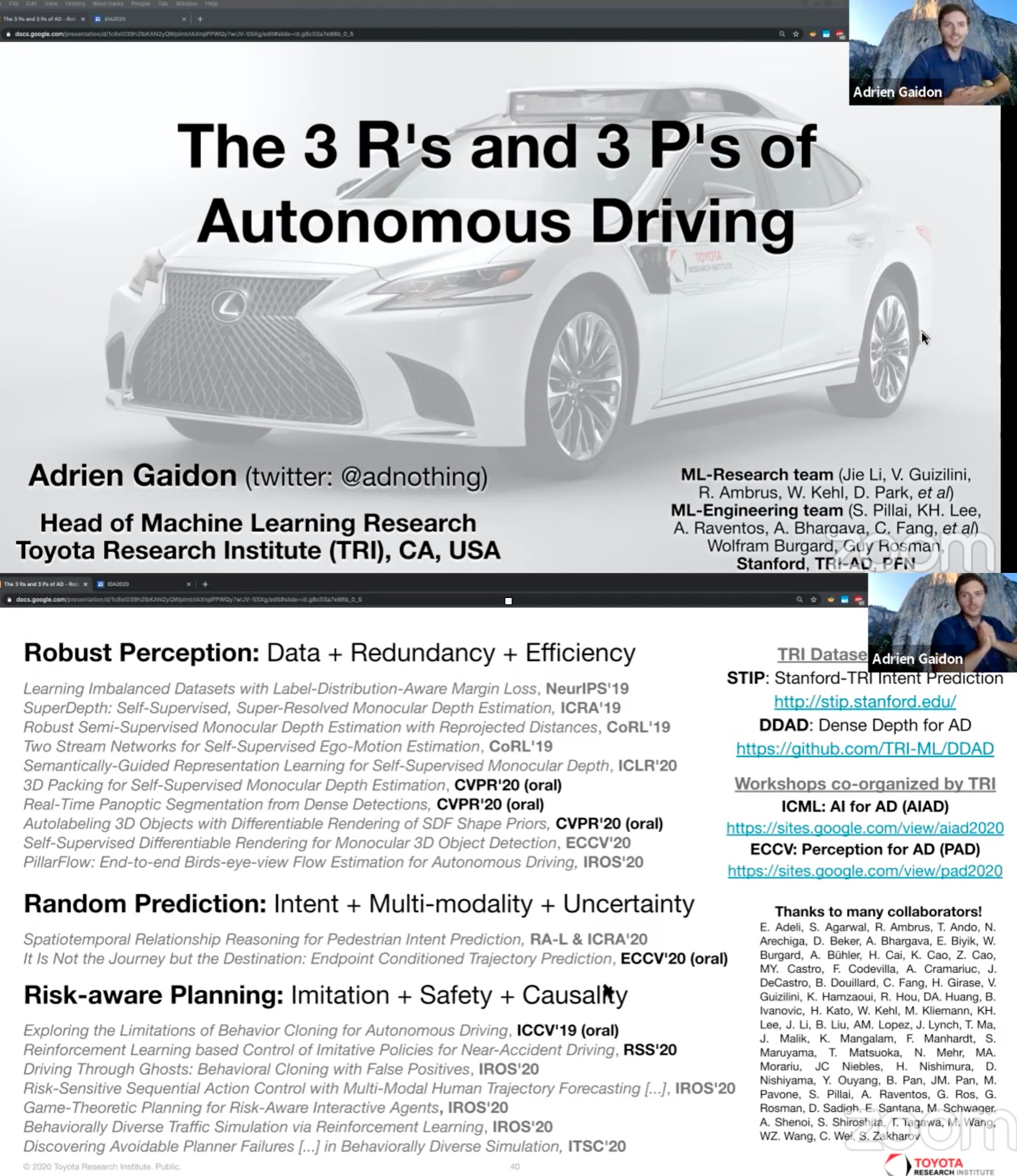
The 3 R’s and 3 P’s of Autonomous Driving, RSS, July 2020
Overview of recent ML Research at TRI across the full robotics stack – (Robust) Perception, (Random) Prediction, and (Risk-aware) Planning – at the RSS 2020 Interaction and Decision-Making in Autonomous-Driving workshop (IDA).

Spatiotemporal Relationship Reasoning for Pedestrian Intent Prediction, ICRA, June 2020
Presentation about our ICRA 2020 paper at the ICRA 2020 Long-term Human Motion Prediction workshop.

Scaling Up ML for Autonomy, April 2020
Talk given at Wayve on going beyond supervised learning for autonomy. Overview of our recent ICCV and CVPR orals on imitation and perception.

Self-supervised Pseudo-Lidar Networks, Stanford, Oct. 2019
Presentation at Stanford of our work on self-supervised monocular depth estimation (monodepth, a.k.a. pseudo-lidar)

Interview at the re:work DL summit, March 2019
A fun interview I gave in San Francisco at the re:work DL summit in 2019 on open problems in world-scale learning for autonomous driving

Beyond Supervised Driving, University of Amsterdam, Jan. 2019
Invited talk on our self-supervised learning research, QUVA (joint lab between Qualcomm and the University of Amsterdam)
AWS re:Invent 2018: Advancing Autonomous Vehicle Development Using Distributed Deep Learning at TRI, Nov. 2018
A talk Chetan Kapoor, Mike Garrison, and I gave in Las Vegas at AWS re:Invent 2018 about our large scale ML infra, one of the first to do distributed deep learning with PyTorch on AWS p3 GPU instances.

Hacker Dojo Lecture on Autonomous Vehicles, Bay Area, Nov. 2018
An introduction to autonomous vehicles I gave at Hacker Dojo.